Control Theory
Outline
제어공학은 동적시스템을 다루는 학문으로 시간에 따라 변화하는 임의의 입력이 동적 시스템에 가해졌을때 시스템의 출력이 어떠한 영향을 받는지에 대해 다룬다. 제어시스템의 목적은 시스템에 가해지는 입력을 적절히 조절함으로써, 시스템에 영향을 미치는 외란과 잡을의 영향을 최소화하고 원하는 출력을 얻을 수 있도록 하는것 이다. 제어공학은 시대에 따라 고전제어와 현대제어로 구분할 수 있으며, 고전제어는 주로 전달함수를 기반으로 PID제어등의 제어시스템을 설계하는 이론이다. 현대제어는 컴퓨터의 활용이 확대되면서 상태공간 방정식에 기반한 제어시스템 설계를 주로 이야기한다.
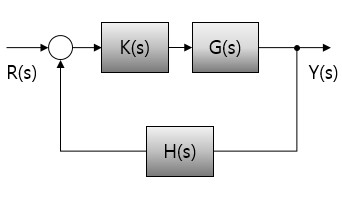
System configuration
 Linear vs Non-linear
Linear vs Non-linear
선형시스템은 중첩의 원리가 적용되는 시스템이다. 중첩의 원리는 가산성과 비례성을 만족하는것을 의미한다. 이 중 가산성이란 주어진 시스템의 입력 U1과 U2가 있을때,
그것을 먼저 더해서 시스템에 입력했을 때의 결과물와 각각을 따로 입력하여 얻은 결과의 합한 값이 같음을 의미한다. 비례성은 입력 U1에 어떤 상수 k를 곱해서 시스템에
입력했을때의 출겨이 U1을 입력하여 얻은 결과에 상수 k를 곱한 결과가 같다는 것을 의미한다.
Time-variant vs Time-invariant
시불변 시스템은 시스템의 모델 파라미터가 시간에 따라 변하지 않음을 의미한다. 시간과 상관없이 같은 입력값을 시스템에 넣으면, 과거든 현재든 미래든
같은 출력 결과값을 내주는 시스템을 시불변 시스템이라 한다. 시변 시스템은 이러한 성질이 성립하지 않는 시스템으로 시스템 자체의 성질이 시간에 따라 변한다고 볼 수 있다.
Continuous vs discrete
연속시간시스템은 시스템의 입력과 출력이 시간에 대한 연속적인 함수로 나타난다. 따라서, 시간의 흐름이 연속된 실수로 표현되므로 아주 작은 시간 간격 안에도
무수히 많은 입력 출력값이 존재할 수 있다. 수학적으로 표현한 물리적 시스템과 해석적으로 구한 해들은 대부분 연속 시간 시스템이다. 이산시간시스템은 시스템의
입력과 출력이 시간에 대해 분절된 형태로 나타나다. 즉 하나의 입력과 출력은 일정하게 구분된 시간 간격마다 존재하며 kth 번째와 같이 주어진 시간 동안의 입력에 대한 출력의
세트들을 유한한 정수 개로 구분하여 셀 수 있다.